Schweizerischer Nationalfonds / Fonds national suisse
SNF: Bild des Monats Dezember 2006: Ein Multirobotersystem für die Geruchslokalisierung
- Bild-Infos
- Download
Bern (ots)
Bild und Text unter: http://www.presseportal.ch/de/galerie.htx?type=obs
Einen Geruch bis zur Quelle zurückverfolgen
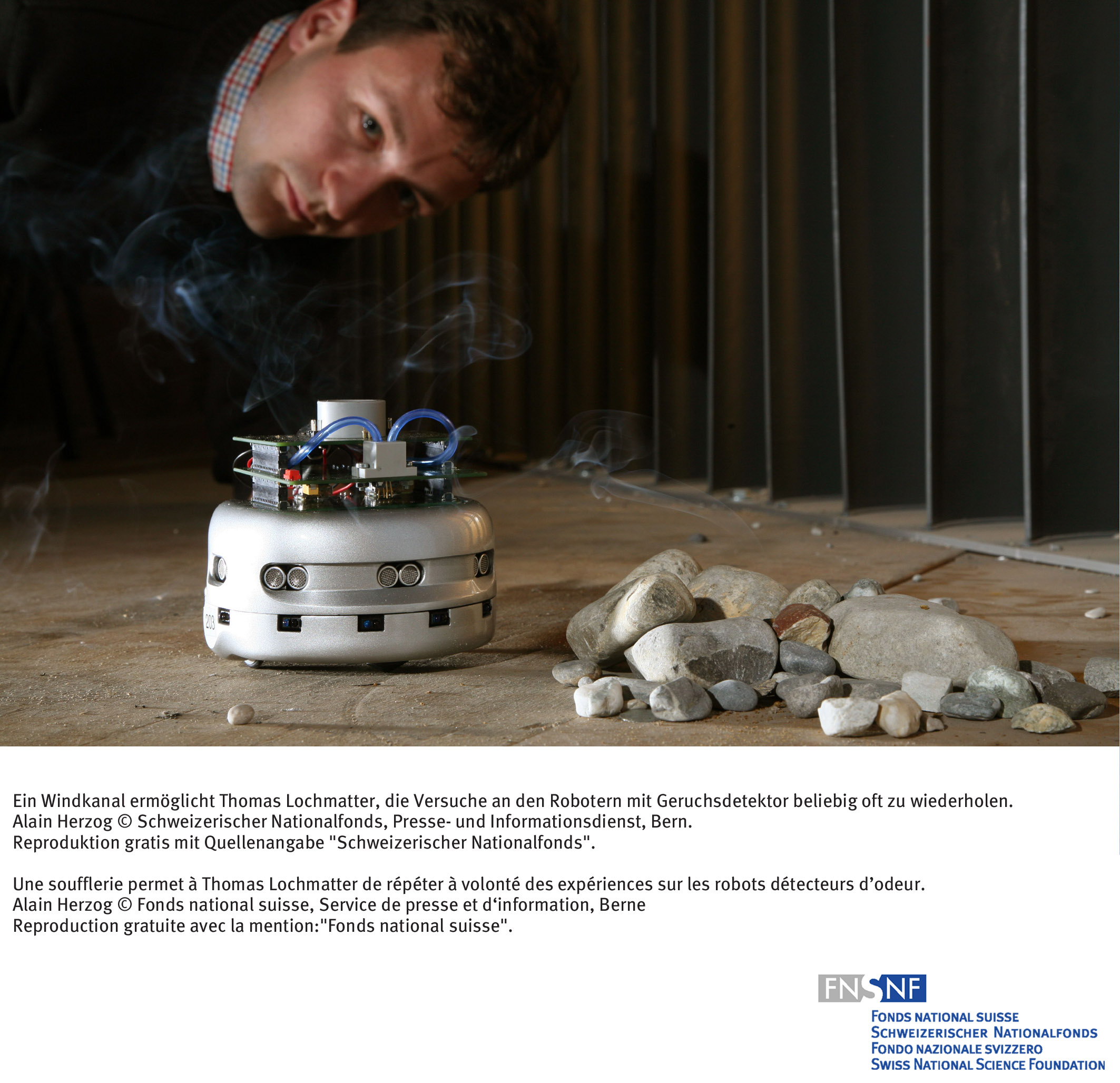
Einen Geruch bestimmen und bis zur Quelle zurückverfolgen mit einem Heer von kleinen Robotern Ein neuartiger Ansatz, der im Rahmen eines Projekts des Nationalen Forschungsschwerpunkts «Mobile Informations- und Kommunikationssysteme» (NFS MICS) zur Anwendung kommt, gibt Anlass zu neuer Hoffnung im Bereich Entminung: Vielleicht muss diese gefährliche Arbeit schon bald nicht mehr von Menschen und Tieren durchgeführt werden.
Geruchs-Sensoren erleben eine rasante Entwicklung. Einige Detektoren erreichen bereits beinahe die Empfindlichkeit einer Hundenase. Obwohl diese Technik noch ziemlich kostspielig ist, wird sie immer häufiger an Flughäfen und Zöllen eingesetzt. Sie bietet sich dazu besonders an, da ein Sensor im Gegensatz zu einem Hund weder Schlaf benötigt noch Launen hat. Ausserdem ist es einfacher, einen Sensor zu regulieren als ein Tier zu dressieren. Allerdings kann eine elektronische Spürnase den Hund nicht vollständig ersetzen. Hier kommen die Algorithmen und Arbeiten des Teams um Prof. Alcherio Martinoli vom Nationalen Forschungsschwerpunkt «Mobile Informations- und Kommunikationssysteme» (NFS MICS) ins Spiel.
Seit einem Jahr entwickeln die Forschenden Werkzeuge, mit denen Roboter einen Geruch aufspüren sollen. Die grösste Hürde bei der Lösung dieser Aufgabe ist die Luft selbst, da ihre Strömungen, Richtungswechsel und Turbulenzen dafür sorgen, dass sich Gerüche unregelmässig sozusagen in «Paketen» verbreiten. Schliesslich hängt die Effizienz der Sensoren natürlich auch von ihrer Reaktionszeit ab.
Die meisten bisher durchgeführten Forschungsarbeiten zum Thema Geruchslokalisierung beschränkten sich auf den Einsatz eines einzigen Roboters. Beim MICS-Projekt werden mehrere Roboter verwendet, und die Erfahrung von Professor Martinoli im Bereich verteilter olfaktorischer Systeme am California Institute of Technology (Pasadena, USA) leistet wertvolle Hilfe. «Wir wollen ein verteiltes System entwickeln, mit dem Gerüche zuverlässiger und schneller lokalisiert werden können. Damit dieses Ziel erreicht werden kann, müssen sich die Roboter untereinander verständigen und koordinieren können», erklärt der Doktorand Thomas Lochmatter. Die Besonderheit des Projekts besteht in der Programmierung, die den Robotern einerseits eine enge Zusammenarbeit ermöglicht, andererseits verschiedene miniaturisierte Module zur Geruchsdetektion, Kommunikation, relativen Positionsbestimmung, Windmessung und Navigation auf kleinstem Raum (etwa ein Würfel mit 10 cm Seitenlänge) miteinander verknüpft.
So sammeln die Wissenschafter mit einer Armada von einem Dutzend Khepera III-Robotern Erfahrungen. Diese Roboter wurden in Zusammenarbeit mit der Firma K-Team in Yverdon (ein Spin-off der ETHL) entwickelt. Sie sind mit einem Sensor für flüchtige organische Verbindungen ausgerüstet, der organische Gerüche (Deodorant, Parfum, Alkohol) aufspürt. Dieser Sensor wurde von MicroChemical Systems in Corcelles (NE) bereitgestellt.
Schnüffelnde Sensoren Die Roboter werden entweder in einem Windkanal mit stabilen und reproduzierbaren Bedingungen oder im Freien eingesetzt. In naher Zukunft möchten die Wissenschaftler die Roboter sogar mit einem Rohr nach dem Vorbild der Nase ausstatten, mit dem diese Gerüche in der Luft oder am Boden «erschnüffeln» können. Diese Arbeiten sind zum Beispiel interessant für die Entminung: Vielleicht können schon bald Maschinen anstelle von Menschen und Hunden diese gefährliche Arbeit übernehmen. Gegenwärtig scheint der Ansatz der Geruchsdetektion jedenfalls am vielversprechendsten, sowohl hinsichtlich der Risiken als auch der Dauer einer Entminung.
Weitere Anwendungsmöglichkeiten des MICS-Projekts sind die Identifikation von Lecks in Reservoiren und Kanalisationen, das Aufspüren von Sprengstoff und Drogen oder auch die Suche nach Verschütteten in Erdbebengebieten.
Parallel zum experimentellen Ansatz führen die Forschenden auch Simulationen durch. Mit Hilfe einer Simulation, die von der Firma Cyberbotics (ein weiteres Spin-off der ETHL) entwickelt wurde, wird das Verhalten eines Roboters mit einem dreidimensionalen virtuellen Modell in möglichst realistischen Situationen untersucht. Schliesslich arbeitet das Team auch an theoretischen Modellen, um die Zuverlässigkeit der eingesetzten Algorithmen zu testen. So kommt diesen Algorithmen beim Zusammenspiel der Sensoren und bei ihrer zielgerichteten Bewegung eine Schlüsselrolle zu.
«Mit diesem Projekt dürften konkrete Fortschritte erzielt werden, sowohl bei der Entminung, die dringend neuer Lösungen bedarf, als auch im Bereich der Robotik und der Informationstechnologie», meint Thomas Lochmatter.
Für weitere Informationen: Thomas Lochmatter Swarm-Intelligent System Group (SWIS) Institut für Kommunikationssysteme Eidgenössische Technische Hochschule Lausanne CH-1015 Lausanne Tel. +41 (0)21 693 12 92 E-Mail: thomas.lochmatter@epfl.ch http://swis.epfl.ch
Text und Bild dieser Medieninformation können auf der Nationalfonds- Homepage abgerufen werden http://www.snf.ch/medienmitteilung